





































The Pioneer Approach to Customized Industrial Automation and Robotics
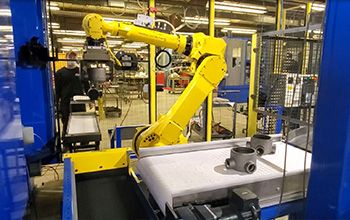
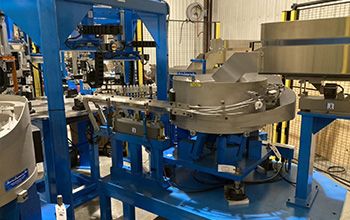
The Pioneer Approach to Customized Industrial Automation and Robotics 12-06-2023 Pioneer Industrial Systems (PIS) is a company that specializes in industrial automation and robotics. We design and build custom machines and systems that can perform various tasks such as material removal, material handling, paint and spray, assembly, and machining. We use robots and artificial intelligence...
Read More
